 کنترل حلقه بسته سیستم های شیردوش با استفاده از درایو باعث صرفه جویی در انرژی می شود.
کنترل حلقه بسته سیستم های شیردوش با استفاده از درایو باعث صرفه جویی در انرژی می شود.
در مقالات قبلی توضیح دادیم که درایوهای کنترل دور برای کنترل موتورهای القایی (آسنکرون) طراحی شده اند. این نوع موتورها ساده، ارزان و قابل اطمینان هستند و قوای محرکه اصلی صنایع در سراسر جهان محسوب می شوند. هرچند، پیشرفت های اخیر در فناوری توسعه انواع دیگری از موتورهای سازگار با درایوها را میسر کرده است. این نوع موتورها معمولا برای کاربردهای خاص مورد استفاده قرار می گیرند یا به دلیل بازدهی بهترشان بیشتر مورد اقبال قرار می گیرند. اما نباید فراموش کرد که بازدهی موتورهای القایی نسل جدید نیز در حال بهبود است. یک موتور پربازده تر به معنی تلفات حرارتی کمتر در موتور، موتوری با اندازه احتمالی کوچکتر و از سوی دیگر هزینه های انرژی کمتر است.
بیایید انواع موتورهای دیگر را بررسی کنیم.
موتورهای آهنربا دائم
موتورهای آهنربا دائم (PMM) مدتی است که در صنایع مطرح شده اند. یک موتور القایی را در نظر بگیرید، اگر روتور آن را با مجموعه ای از آهنرباهای دائم جایگزین کنید یک موتور آهنربا دائم خواهید داشت، همانطور که در شکل زیر مشاهده می کنید.
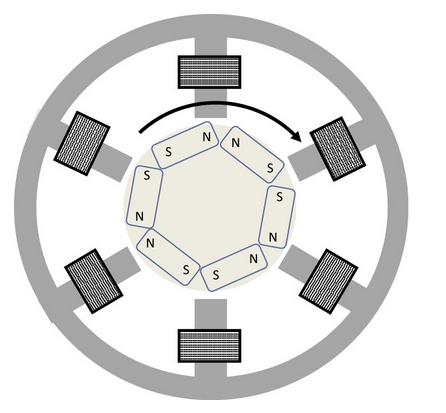
تصویر سطح مقطع موتور آهنربا دائم
با اعمال یک منبع فرکانس متغیر بع سیم پیچ های استاتور، میدان مغناطیسی گردان با آهنرباهای دائم روتور میدان برایندی ایجاد می کنند که منجر به تولید گشتاور می شود. در این نوع موتور هیچ جریانی در روتور جاری نمی شود بنابراین تلفات روتوری نخوایم داشت که باعث بازدهی بیشتر موتورهای PM می شود.
با این حال، کنترل این نوع موتورها به اندازه کنترل موتورهای القایی آسان نیست. میرایی ذاتی در موتورهای PMM کم است، در نتیجه احتمال نوسان های گشتاوری بیشتر است. به منظور کنترل این مشکل، درایو باید در حالت کنترل برداری مورد بهره برداری قرار بگیرد. ما در مقالات بعدی به بحث کنترل برداری با جزئیات بیشتری می پردازیم، اما همینقدر کافی است که کنترل گشتاور و شار به صورت آنی با استفاده از کنترل برداری منجر به عملکرد نرم و خوبو موتورهای PMM می شود.
نکته دیگر این است که شناسایی موقعیت آهنرباها در لحظه استارت کمک شایانی به راه اندازی نرم و موفق موتور می کند. نرم افزار درایو این کار را به صورت خودکار انجام می دهد، اما راه اندازی با کمی تاخیر انجام خواهد شد.
در حال حاضر نگرانی هایی وجود دارد که مواد معدنی اولیه مورد نیاز برای ساخت آهنرباهای موتور کمیاب و گران هستند. در حقیقت این مواد کمیاب نیستند، بلکه بهتر است بگوییم منابع محدودی هستند که غالبا در چین یافت می شوند. منابع و معادن جدیدی در حال کشف هستند و مواد مغناطیسی دیگری نیز تحت مطالعه و بررسی هستند، اما PMM ها همواره از موتورهای القایی عادی گرانتر خواهند بود. با این حال، بازدهی بهتر و اندازه کوچکترشان باعث شده بسیاری از مصرف کندگان به آن ها روی بیاورند و در حال حاضر PMM ها توسط اکثر سازندگان موتور قابل ارائه هستند.
موتورهای سنکرون رلوکتانس
موتور سنکرون رلوکتانس (SRM) یک گام جلوتر رفته است. حالا دیگر روتور تنها از ورق های فولادی ظریفی تشکیل شده است، همانطور که در شکل زیر می بینید.
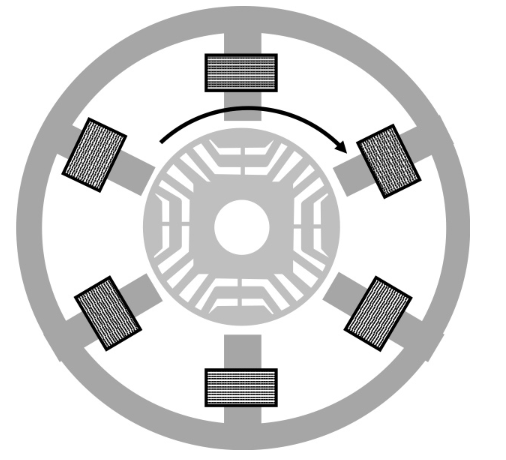
تصویر سطح مقطع موتور سنکرون رلوکتانس
میدان مغناطیسی سیم پیچ های استاتور مقاطع متناظر روتور را مغناطیسه می کنند. اینجا هم میدان برآیند گشتاور ایجاد می کند که این گشتاور منجر به چرخش شفت می شود. همانند موتوهای PM، موتورهای SR نیز نیازمند کنترل دقیقی هستند تا جلوی نوسان های گشتاوریشان گرفته شود، بنابراین همچنان به کنترل برداری نیاز داریم. در این نوع موتورها نیز تلفات روتور نداریم در نتیجه بازدهی از یک موتور القایی بیشتر است و در حقیقت قیمت بالاتر موتور را می توان با بازگشت سرمایه ناشی از کاهش مصرف انرژی توجیه کرد.
دقت کنید که موتورهای سنکرون رلوکتانس را با موتورهای کلید رلوکتانسی اشتباه گیرید. موتور کلید رلوکتانسی نیازمند آرایش متفاوت الکترونیک قدرت و همچنین فیدبک موقعیت است. این موتورها سر و صدای زیادی دارند و نوسانات گشتاوری بالایی نیز دارند، هرچند ارزانتر بوده و بسیار کارآمد هستند.
موتورهای دی سی بدون جاروبک
دی سی بدون جاروبک به انواع موتورهایی اطلاق می شود که در آن کموتاتور یک موتور DC با کلیدزنی الکترونیک مثل درایو جایگزین شده است. موتورهای BLDC در اساس همانند موتورهای PM هستند اما غالبا به موتورهایی گفته می شوند که به صورت برعکس ساخته می شوند؛ یعنی در آن ها استاتور در لایه داخلی قرار می گیرد و ثابت است، و روتور که شامل آهنرباها است در لایه خارجی قرار می گیرد.
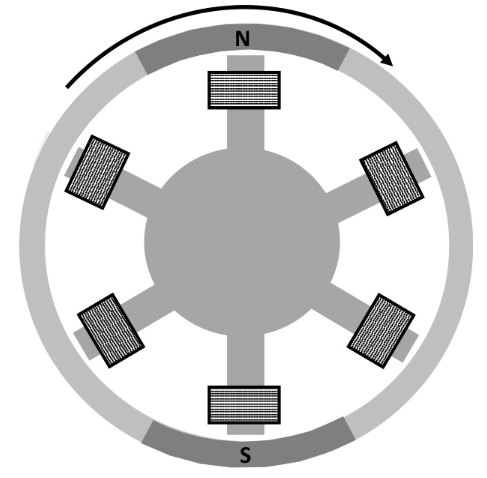
این آرایش به خصوص برای کاربردهایی همچون فن های تهویه کوچک مناسب است. موتورهای BLDC نیز باید توسط نوعی درایو کنترل دور کنترل شوند. در کاربردهای فن های کوچک سیستم درایو درون استاتور ساخته می شود و ممکن است از یک سنسور برای شناسایی موقعیت روتور بهره ببرد. این نوع از موتورهای BLDC توسط اینورترهای ساده موج مربعی که با فیدبک سنسور کنترل می شوند مورد بهره برداری قرار می گیرند. این موتورها از برق AC تغذیه می شوند در نتیجه نام آن ها که DC بدون جاروبک است کمی فریب دهنده است. اما از آنجا که سنسور در هنگام چرخش روتور هر سیم پیچ استاتور را با استفاده از اینورتر با سوئیچ زنی خاموش و روشن می کند، این موتورها کمی شبیه به موتورهای DC هستند که در آن ها سوئیچ الکترونیکی جایگزین کموتاتور و جاروبک ها شده است. به همین دلیل نام دیگر آنها موتورهای DC با کموتاتور الکترونیکی است. موتورهای BLDC بزرگتر که استاتور آن ها روی لایه خارجیشان نصب شده است همانند PMM ها کار می کنند؛ آن ها می توانند بدون سنسور کار کنند در صورتی که درایو بتواند موقعیت و سرعت روتور را با الگوریتم کنترل برداری تشخیص دهد. درایو می تواند در این حالت شکل موجی شبیه به موج مربعی ایجاد کند تا عملکرد موتور بهینه شود.