درایو، اینورتر، VFD، VSD، کنترل دور و… همگی نام هایی رایج برای پیچیده ترین و پیشرفته ترین تجهیز مرتبط با کنترل ماشین های الکتریکی هستند. درایو یک تجهیز الکترونیک قدرت است که به واسطه آن می توان سرعت موتورهای الکتریکی را کنترل کرد. بهتر است قبل از این که به درایوها بپردازیم و این که چگونه می توان آن ها را مورد بهره برداری قرار داد، نگاهی به اساس عملکرد خود موتورهای الکتریکی و تاریخچه کنترل کننده های موتورهای الکتریکی بیاندازیم.
کنترل سرعت موتورهای الکتریکی در صنایع مختلف همواره مزایای فراوانی داشته است. کنترل سرعت می تواند تقریبا برای تمام فرایندهایی که با موتورهای الکتریکی کار می کنند مفید باشد. کنترل سرعت نه تنها عموما باعث بهبود فرایند می شود، بلکه در بسیاری از موارد منجر به صرفه جویی های قابل توجه در مصرف انرژی نیز می شود.
صنعت آب از درایو های کنترل دور برای کاهش مصرف انرژی و بهبود کنترل بهره می برد
قبل از این که کنترل کننده های الکترونیکی مانند درایوها به بازار بیایند، موتورها را با روش های مختلفی کنترل می کردند، مثلا با کنترل کردن جریان میدان در موتور DC با استفاده از مجموعه ای از مقاومت ها یا موتورهای دیگر. اما با ورود تریستور به عنوان اولین نیمه رسانای قدرت در دهه 50 میلادی، این امکان به وجود آمد که بتوان ولتاژ آرمیچر و در نتیجه سرعت یک موتور DC را به واسطه کنترل فاز کنترل کرد. این نوع درایو های DC هنوز هم ساخته می شوند و به طور گسترده ای مورد استفاده قرار می گیرند.
هرچند، چالش اصلی همواره کنترل سرعت موتورهای القایی AC یا همان موتورهای آسنکرون بوده است. ماشین های DC معمولا دو سیم پیچ دارند (سیم پیچ های میدان و آرمیچر) به همراه جاروبک ها و کموتاتور، ماشین القایی فقط یک سیم پیچ استاتور دارد به همراه روتور. روتور معمولا از شیارهای رسانایی مانند آلیاژ آلومینیوم و مس روی هسته آهنی ساخته می شود. در موتورهای القایی خبری از جاروبک ها و کموتاتور نیست، به همین دلیل ماشین القایی ارزان تر، ساده تر و قابل اطمینان تر است. با این تفاسیر، تعجبی ندارد که چرا اکثر موتورهای مورد استفاده در صنایع مختلف دنیا موتورهای القایی هستند. اما اساس عملکرد یک ماشین القایی چیست، و چرا نیاز به درایو کنترل دور دارد؟
برای شروع بهتر است به بررسی ترانسفورماتور سه فاز شکل زیر بپردازیم.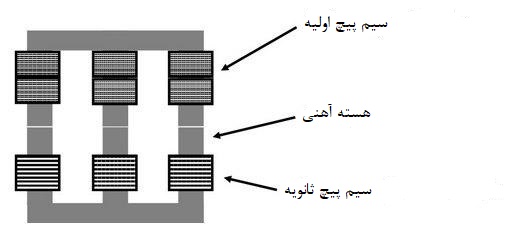
اگر به سیم پیچ اولیه ترانسفورماتور برق سه فاز متصل کنیم، یک جریان سینوسی در سیم پیچ اولیه جاری خواهد شد. این جریان موجب به القا شدن شار مغناطیسی در هسته آهنی ترانسفورماتور می شود، که این شار با موج ولتاژ سینوسی ورودی نوسان می کند. این نوسان در سیستم قدرت ایران دارای فرکانس 50 Hz است.
این شار مغناطیسی متغیر موجب القای ولتاژ در سیم پیچ ثانویه می شود و اگر به دو سر سیم پیچ ثانویه باری متصل باشد، جریان در سیم پیچ دوم جاری خواهد شد. نسبت تعداد دورهای سیم پیچ اولیه به ثانویه، تعیین کننده نسبت ولتاژ اولیه به ثانویه خواهد بود، و این کاربرد اصلی ترانسفورماتورهاست.
حال تصور کنید که سیم پیچ ها و هسته را جمع کنیم، یک فاصله هوایی اندک بین هسته اولیه و ثانویه به وجود آوریم و اجازه دهیم که سیم پیچ ثانویه که الان دیگر روتور نام دارد، آزادانه بچرخد. این اساس یک موتور القایی خواهد بود که در شکل زیر به نمایش در آمده است.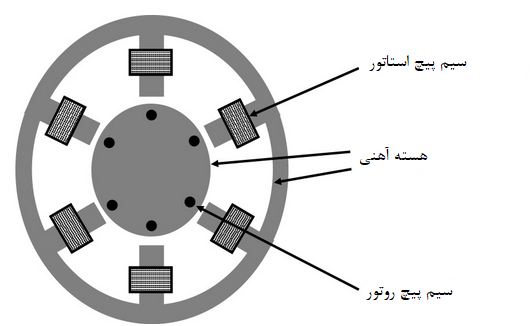
حال زمانی که یک تغذیه سه فاز را به سیم پیچ اولیه (که دیگر استاتور نام دارد) متصل کنیم، همان پدیده ترانسفورمری قبلی رخ می دهد و جریان در سیم پیچ های روتور جاری خواهد شد. همانطور که ذکر شد، روتور معمولا دارای شیارهای رسانایی روی هسته آهنی است که در دو طرف اتصال کوتاه شده اند و نقش سیم پیچ ثانویه را بازی می کنند. از آنجا که روتور در این حالت شبیه یک قفس می شود، به این موتور گاها موتور قفس سنجابی نیز می گویند.
شکل زیر ساختار رایج یک موتور القایی را نشان می دهد.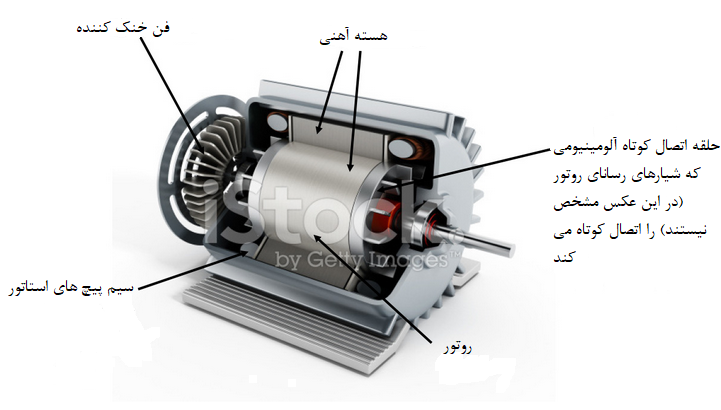
حال اگر ما یک میدان مغناطیسی و جریان الکتریکی ایجاد کنیم، می توانیم نیرویی داشته باشیم که بر اساس قانون دست چپ فلمینگ موجب چرخیدن روتور می شود، و این کلیت کارکرد یک موتور است. روتور سرعت می گیرد چون می خواهد دائما میدان مغناطیسی دوار استاتور که با فرکانس 50 Hz برق تغذیه در حال نوسان است را دنبال کند و به آن برسد، در نتیجه این عمل ترانسفورمری تنها با برق AC امکان پذیر می باشد. حال اگر سرعت روتور به سرعت دوران یا نوسان میدان مغناطیسی استاتور برسد، دیگر نیروی برایندی بین میدان های مغناطیسی به وجود نمی آید و این به معنی از بین رفتن گشتاور و متوقف شدن موتور است، به همین دلیل است که در موتورهای القایی همواره سرعت روتور کمی کمتر از سرعت فرکانس تغذیه اعمالی است و به آن ها موتورهای آسنکرون نیز اطلاق می شود. این اختلاف سرعت را لغزش می نامند. وقتی یک موتور القایی زیر بار برود، لغزش کمی افزایش می یابد و جریان بیشتری کشیده می شود.
با دو برابر کردن (یا چند برابر کردن) تعداد سیم پیچ ها یا همان تعداد جفت قطب ها می توان سرعت چرخش موتورهای القایی را کاهش داد. بنابراین یک موتور دو قطب بدون در نظر گرفتن لغزش با سرعتی برابر با 3000 rpm می چرخد و یک موتور چهار قطب نیز با سرعت 1500 rpm می چرخد.
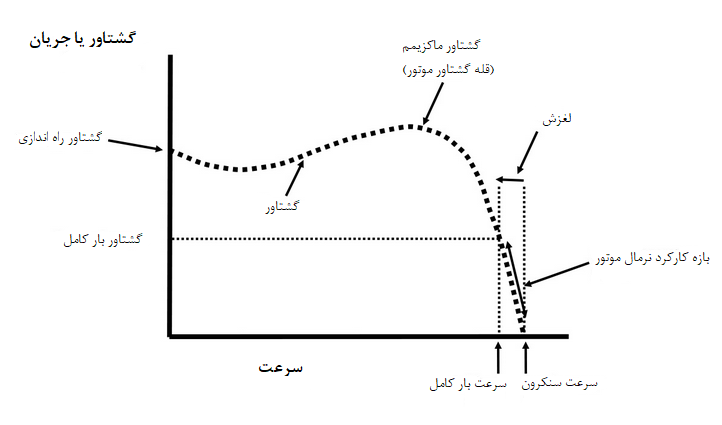
مهم ترین مشخصه در موتورهای الکتریکی منحنی گشتاور سرعت آن هاست. شکل زیر رابطه کلاسیک گشتاور-سرعت یک موتور القایی را نشان می دهد.
با توجه به بحث های صورت گرفته اگر بخواهیم سرعت موتور را کنترل کنیم، کافی است فرکانس تغذیه اعمالی را تغییر دهیم. البته اگر بخواهیم فرکانس را تغیی دهیم در کنار آن باید ولتاژ را نیز به درستی کنترل کنیم چرا که جریان مغناطیس کنندگی استاتور به انتگرال ولتاژ بستگی دارد که انتگرال ولتاژ نیز برابر است با مساحت زیر موج سینوسی ولتاژ. در نتیجه اگر فرکانس را کاهش دهیم، آنگاه دوره تناوب موج سینوسی افزایش می یابد، که به این معنی است که مساحت زیر موج افزایش می یابد و منجر به جریان های افزاینده مغناطیس کنندگی در موتور می شود. بنابراین اگر بخواهیم فرکانس را کاهش دهیم، باید ولتاژ اعمالی به موتور را نیز به صورت تناسبی کاهش دهیم.
در قسمت بعد به چگونگی کنترل ولتاژ و فرکانس به صورت الکتریکی توسط یک درایو کنترل دور می پردازیم.